Lidar Business: What are your Installation Time Targets
To continue the conversation about hidden cost, I spoke with a number of customers this week and asked about installation and system setup time and the hidden cost associated with that. In the previous article I spoke mostly about the hidden cost of hardware. In this article I will cover the hidden cost of time.
Most agreed that the Camera-based setup is, once again, the golden standard that Lidar companies need to me to be competitive in the market. Some say Radar is just as good, if not better. Everyone agreed though that today, Lidar based installations are more complicated and take longer to install. This is not totally unfair, because you can get more out of the system when it is all said and done and people are still training on the technology.
Still, I have spoken with customers who told me about Lidar-based installations that took multiple days, required up to six people, a full survey of the intersection and Gigabytes of data to be shipped across the ocean. This is simply not scalable and needs to be addressed before it can be deployed in large numbers.
In this article I will lay out time targets for an installation of an average intersection. If your system (hardware and software) is not able to achieve this today, this is something to work towards.
First, how many sensors are needed for an intersection? Your baseline is this:
1 x 32 beam sensor (~300,000 points-per-second) per approach lane.
This sensor needs a 'Sensor Range' of 200m. If you remember the very first article, this gives you a Effective Tracking Range of ~50m, which easily covers the intersection.
In this example we will take the intersection shown on the right for a total of three sensors:
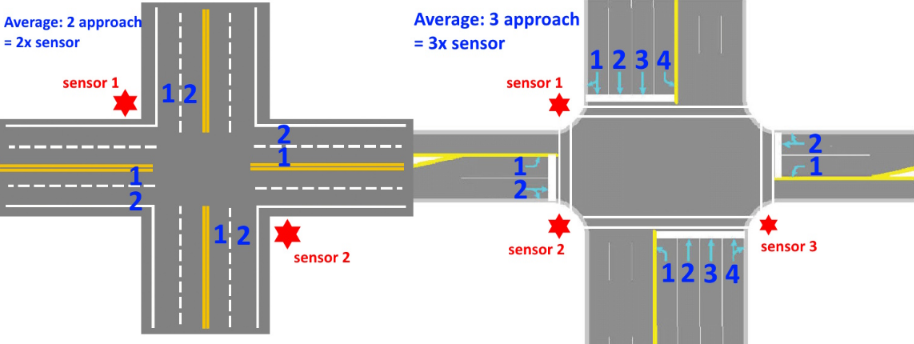
Note: All current rotating sensors are built on automotive specs, which are not very suitable for this non-automotive scenario. A proper non-automotive spec sensor with improved field-of-view and optimized beam spacing, can reduce the number of sensors needed and only two sensors can handle a 3 approach intersection. More on that in another article in the future.
Before anyone asks if you can replace 3x 32 beam with a single 128 beam sensor because it has more beams and resolution? The answer is: absolutely not. 3x32 will absolutely destroy a 1x128 in effective tracking performance. I will dedicate a whole article to this, because I get this question all the time.
Also, for forward facing sensors, the math is a little different, depending on the Field of View.
Second, some prerequisites. Civil work is hard to estimate and harder to plan. Therefore, I will assume the following:
- Sensors will be installed on traffic light poles.
- Power and Ethernet (or PoE) is available at each pole.
- Space, Power and Ethernet is available in the roadside cabinet.
- The processing computer is pre-installed with all required software.
Your time targets:
- Roadside cabinet Processing Unit setup: <1 hours
- Network configuration: <1 hour (should be pre-configured really)
- Sensor physical installation time: <1 hour per sensor
- Sensor calibration time: <15 minutes per sensor
This means that a 3 approach lane (= 3 sensor intersection) should be installed, calibrated and operational in: 1 + 1 + 3 + 0.75 = 5 hours 45 minutes maximum. A bunch of work can be done in parallel, but we will not include that in the total time for this example.
For the sake of argument, we are looking at a system that can look for pedestrian crossings, stop-bar detection and vehicle counts. Nothing exotic, just the basic stuff.
A typical installation and calibration scenario should be handled like this:
Only 2-3 people travel to the site, all installers/supervisor. Nobody from the sensor or perception company needs to be there.
- A (local) installer goes on site with a bucket lift.
- On-site installer shares video of site with remote expert to check and discuss any obstacles and determine exact installation location and pose for each sensor.
- Installer installs the computer in the roadside cabinet and enables remote access, if cabinet internet is not available, the recommended way is through a 5G cellular modem or tethering a phone to the processing computer.
- A remote calibration expert preps the computer (any last minute updates, verify configuration etc..)
- On-site installer starts installing the first Lidar while the computer is being prepped.
- Once first Lidar is powered up, the remote calibration expert does the calibration, sets the world-zero point, aligns along Axis and aligns ground.
- Initial rough calibration should be done in less than five minutes, so the remote expert can relay any changes to location, pitch, roll or yaw to on-site installer.
- When the remote expert is happy with the sensor pose, the on-site installer moves on to the next sensor
- Remote expert does final calibration of sensor
- This repeats until all sensors are done.
- Once all sensors are complete, take at least 300 seconds recording of the site for further analysis.
- If (exclusion) zones need to be created, this is the time.
If the system has permanent remote access, great. The local installer can go home, and the rest can be done remotely. Often this is not the case, due to cyber-security restrictions, so the remote expert needs to work fast.
Your #1 goal, as the Lidar solution provider is to limit the number of trips to a site. Obviously, an installer has to physically install the system, but there is no reason for additional FAE's to be at every deployment beyond PoC's. Zero trips is your target, plain and simple. One trip is acceptable for the first couple of installations. Two trips is not. Bucket truck goes out at most once. If they have to go out more than once, that is not acceptable, make changes to your system.
Your #2 goal is to keep road-closures to a minimum. There is no reason a Lidar should be installed over the road-way. All current Lidar can be installed on the vertical part of the traffic poles. This allows any bucket-truck to park on the side of the road, and only require to close the right turning lane while work is being done.
You have to realize that each trip adds: cost of labor, cost of travel, cost of hotels, cost of meals. For a short domestic trip, this quickly adds up to USD 1000 per person per day.
With the right hardware, software and trained people these targets are reasonable and realistic. If your system cannot meet these targets, you need to talk to your customers and/or through simulated scenario's and identify your bottlenecks. With everything you do, you have to imagine doing it 1000 times. Then you execute the function your are considering at least 20 times in a row. If things starts to annoy you at under 10 times, you need to redesign the functionality.
For example, if you need zones, they should be semi-automatically created using templates or by looking at how vehicles move. For example, some of the Radar-based systems are able to fully automatically learn the lanes and stop bar locations with little to no human intervention. Full point-cloud survey should not ever be necessary for the system in this example. If your system requires manual zones for each lane, imagine doing it 1000 times, don't even bother executing it ten times in a row. just go redesign your system.
Don't believe me? The below three sensor intersection was installed and calibrated in one afternoon. The calibration took only 60 minutes total, including tweaking and optimizing the tracking parameters. The whole setup was completed and operational within 15 minutes of the last sensor being powered up.
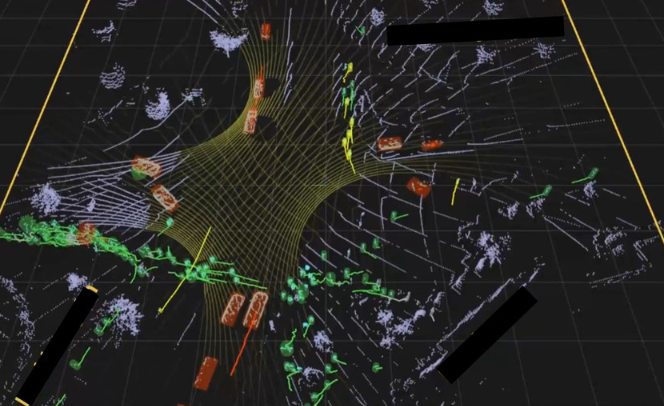
This particular intersection was done by three installers who had never done this before, so it also included training time in this particular install. In this case I was there personally to train and supervise. Other installations I have been part of, I did remotely and were done according to the steps above, except that the installers left immediately after the sensors were powered up, which required them to come back to make pitch adjustments, hence the extra step in the list to avoid that second trip.
So, we have established the above time target for the intersection at ~5h45m max. With labor overlap (computer prep and sensor installation) I believe the real target should be closer to:
4 hours
for a trained crew.
But, what about cost per intersection?
For people who clicked-through the LinkedIn post and are still reading, your reward is the best bit of info of this article:
The sensor used in the above real install can be purchased for around USD 5,000 per unit. This is a reasonable price for a high-performance unit and puts you pretty close in price to a high-end camera.
The computer should not cost more than USD 2000.
We talked about brackets and cabling before, if done right, those will cost USD 150 max per sensor.
If we add some miscellaneous cost for switches, ethernet cable and other small items, it adds up to:
Sensors: 3x 5000 = 15,000
Computer: 2000
Brackets + Cabling: 3x 150
Misc: 1000
~18,500 USD for a 3-sensor intersection
That is your target price for the hardware.
Take cost-of-labor:
3x installer on-site for 5.5 hours @ USD 100 p/h = 1650.
Add some overhead and buffer. That makes ~20K for an intersection installation.
This does not yet include software licensing. Those prices can vary dramatically, though if you are quoted more than USD 5,000 for a three-sensor setup you should probably look elsewhere.
So, all in all, outfitting an entire intersection with Lidar should cost around
USD 25K
for a three-approach intersection.
I verified this with a number of people in the industry and this number is competitive with current Camera and Radar based systems. Those are currently a little cheaper, but are mature systems, have installers with decades of training and have deployed in volume. I am convinced that, if the Lidar industry is willing to listen and make the necessary changes, it can compete in this industry.
So, with all that said: Lidar/Perception/Solutions companies; Those are your targets if you want to be competitive in ITS.
Disclaimer: The above are baselines. Although I am very confident in these numbers, there will always be exceptions. For example, once a system starts making decisions and taking actions, like directly applying brakes on vehicles (through V2X commands), you enter the functional-safety zone and things get exponentially more difficult and expensive. The above example does NOT do that.
If you are a Lidar customer and want a second and independent opinion, I am always available to check and verify. Just contact me and I will work with you to pick the best system for your project.